| 1類別 | 2項目名稱\榮譽稱號\實力 (證書下載請點擊超鏈接) | 3課題名稱 |
| 獲獎類 | 北京市誠信品牌企業 | |
| 平臺類 | 中國災害防御協會應急科技裝備專委會 掛靠單位 | |
| 平臺類 | 水利部科技推廣中心防汛搶險無人化裝備技術推廣基地 | |
| 資格類 | 工業和信息化部專精特新“小巨人”企業 | |
| 資格類 | 北京市級企業科技研究開發機構 | |
| 資格類 | 輻射安全許可證 | |
| 資格類 | 醫療器械經營許可證(凌天制造) | |
| 資格類 | 民用無人機駕駛員訓練機構合格證(北京凌天) | |
| 資格類 | 民用無人機企業服務能力等級資質證書(甲級) | |
| 平臺類 | 中關村應急產業協同創新平臺 | |
| 平臺類 | 徐州市應急產業聯合會 (徐州基地公司 作為牽頭單位) | |
| 平臺類 | 徐州市森林防火裝備工程研究中心 (徐州基地公司 作為牽頭單位) | |
| 資格類 | 北京市科協特種機器人( 智能控制 )企業創新聯合體牽頭單位 | |
| 資格類 | 北京亦莊開發區科學技術攻關先鋒港 | |
| 入圍類 | 水利先進實用技術重點推廣指導目錄 | 水面救援遙控機器人 |
| 資格類 | 北京市專精特新“小巨人”企業 | |
| 資格類 | 北京市高新技術企業 | |
| 資格類 | 北京市知識產權示范單位 | |
| 資格類 | 北京市重點應急企業 | |
| 獎項類 | 第三屆安全科技進步獎二等獎 | 超大城市安全風險評估與監測預警關鍵技術研究 |
| 獎項類 | 中國自動化學會科學技術獎 | 成品油倉儲經營環節風險檢測與智慧防控關鍵技術與應用示范 |
| 獎項類 | 2019獲得第一屆安全科技進步獎 | 防爆消防滅火偵察機器人 |
| 獎項類 | 第二屆安全科技進步獎二等獎 | 石化企業重特大安全生產事故應急處置輔助決策系統關鍵技術及裝備 |
| 獎項類 | 第二屆安全科技進步獎三等獎 | 應急救援快速部署監測系統 |
| 獎項類 | 中國災害防御協會抗疫突出貢獻獎 | |
| 獎項類 | 2015獲得河南省工業和信息化科技成果獎 | 打鉆防滅火裝置 |
| 獎項類 | 河南省煤炭科技成果獎 | |
| 獎項類 | 第六屆中國消防協會科學技術創新獎 | |
| 獎項類 | 第十二屆中國消防協會科學技術創新獎 二等獎 | 加油站(庫)風險精準監測與應急處置 關鍵技術與應用示范 |
| 獎項類 | 2018年“創新創業·惠民生優秀項目 |
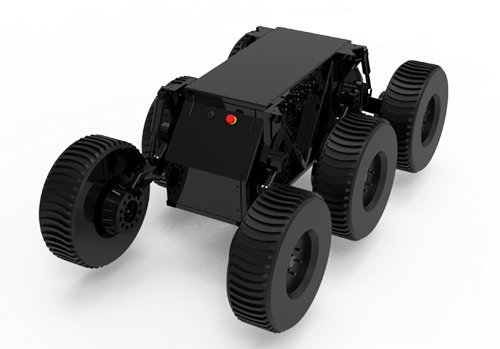
一、產品概述
LT-1000 輪式機器人底盤是一款四驅自主導航機器人,根據應用場景檢測需求配置系統所需要的傳感器,以及時獲取設備運行狀態、設備故障信息、環境信息等;替代人工實現遠程巡查,在危化事故或特殊作業下可實現特巡和定巡任務,實現遠程在線遠程監測,在減少人工的同時,大大提升運維的內容和頻率,改變傳統運維方式,實現運維智能化。
二、產品功能
1)★自主運動:2個800w電機控制行走,1個200w電機控制擺臂;
2)★自主導航、巡航:非人工干預的情況下自主完成固定路線巡邏、隨機路線巡邏及重點部位查看、檢測任務;機器人最小分辨率為10厘米;
3)★自主定位:通過差分GPS實時定位,綜合定位在5cm以內,任務點定位誤差在±3cm以內,能向其他模塊提供實時位置信息;
4)★自主智能避障:通過激光雷達避障、視覺避障、超聲波雷達避障三合一體避障方式,實現避停和繞開動態障礙的重規劃,保障自身、環境及工作人員的安全,繞障過程中與障礙物保持不低于10cm安全距離;
5)★自主充電:機器人電量低于一定閾值會自動導航至預設充電樁位置,并與充電樁通訊引導對準完成自身電量補給;
6)支持選配雙向語音對講,指揮平臺與機器人端進行語音傳輸;
7)支持選配視頻監控、錄制、預警,搭載紅外熱成像儀;
8)★支持選配人臉識別、車牌識別等智能功能;
9)★支持選配多路氣體環境監測(VOC、O3、SO2、H2S、NO、CO、CH4);
10)★平臺支撐負載大,可達200KG負載,抗高溫、防水、防護等級IP65;
11)通訊傳輸采用4G或wifi(加基站)方式,具有覆蓋廣特性,可滿足超遠距離傳輸;
12)產品技術文檔齊全,開放大量API接口,便于二次開發;
13)★可定制化,滿足客戶多結構,多傳感器需求;
三、產品參數
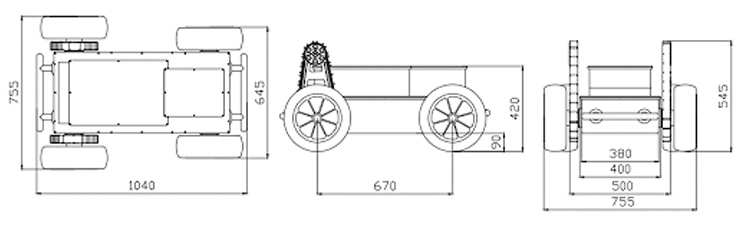
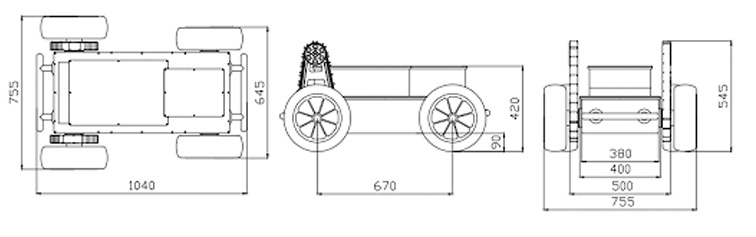
1 設計尺寸 1040mm*755mm*420mm
2 ★運行速度 0-1.6m/s
3 驅動輪直徑 330mm
4 表面處理 氧化發黑
5 ★防護等級 IP65
6 驅動功率 800W*2
7 額定功率 800W*2
8 額定電流 40A
9 電機類型 48V直流無刷電機
10 ★整車額定扭矩 127N.m
11 自重 100KG
12 額定載重 150KG
13 電池 48V/90Ah鋰電池
4 續航時間 >6h
15 運行溫度 (-20°至50°)
16 存儲溫度 (-20°至50°)
17 ★離地高度 90mm
18 編碼器反饋 1500RPM
19 控制方式 差速
20 ★涉水深度 300mm
21 搭載系統 linux系統
22 控制接口 100M網口
23 越障高度 90mm
 6X6差速輪式機器人底盤 010-51652021 13370188210
6X6差速輪式機器人底盤 010-51652021 13370188210 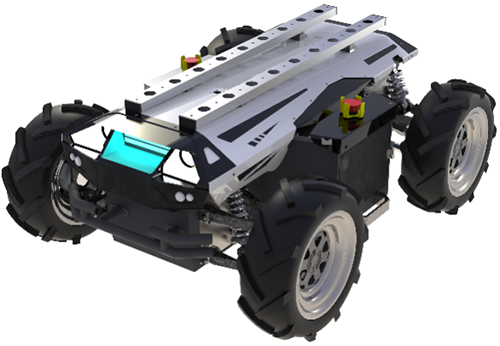 阿克曼輪式機器人底盤 010-51652021 13370188210
阿克曼輪式機器人底盤 010-51652021 13370188210  差速輪式機器人底盤 010-51652021 13370188210
差速輪式機器人底盤 010-51652021 13370188210 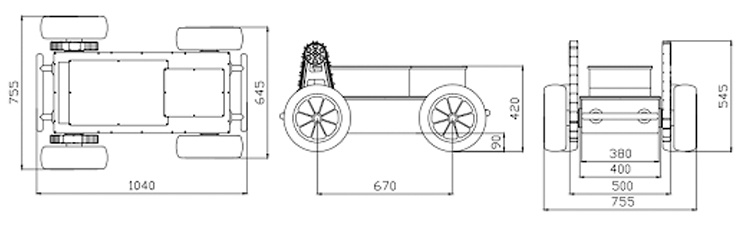 輪式機器人底盤 010-51652021 13370188210
輪式機器人底盤 010-51652021 13370188210  防爆輪式機器人底盤 010-51652021 13370188210
防爆輪式機器人底盤 010-51652021 13370188210  官方微信
官方微信 手機二維碼
手機二維碼